
















* 초당 2cm 속도로 느슨한 모래를 파고 들었다.
* 자연에서 얻은 세 가지 땅 파기 기술 결합 ; 식물뿌리, 모래 문어, 도마뱀
* 새로운 응용 가능성; 관개용 호스, 전선용 파이프를 파고 측정하거나 토양 샘플 수집
로봇이 지하세계 정복에 나섰다.
로봇 '땅파는 벌레'는 이전의 누구보다 빠르게 지하를 팔 수 있다.
자연에서 복사:
과학자들이 지하를 효과적이고 빠르게 파고 뒤집을 수 있는 새로운 유형의 로봇을 만들었다. 공기압 로봇 웜(robot worm)은 자연에서 본보기가 되는세 가지 드릴링 기술을 결합했다 : 식물의 뿌리 끝, 모래 문어 그리고 도마뱀이다.
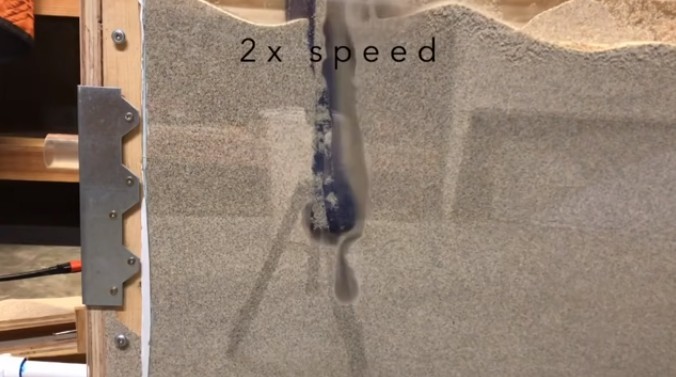
첫 번째 테스트에서 로봇은 느슨한 모래를 초당 2cm의 속도로 팠다. 이는 이전에 개발된 다른 어떤 로봇보다 빠르다. 과학자들이 "Science Robotics"에 땅파는 로봇을 소개했다.
 |
▲ 이 로봇 땅파는 벌레는 앞에 있는 어떤 로봇보다 빠르고 많은 동물보다 빠르게 모래를 파고 들어갈 수 있다. © Nicholas Naclerio |
로봇은 이제 거의 모든 곳에서 사용된다.
로봇은 심해로 잠수하고, 드론으로 공중을 날고, 다른 행성을 탐험하기까지 한다.
로봇 도우미는 거친 지형이나 좁은 복도에서 오랫동안 자신을 입증했다. 그러나 로봇 탐사의 한 영역은 지금까지 거의 다루어지지 않았다. 바로 지하다.
움직임에 강한 저항력을 받기 때문에 침투하기 어렵고, 동시에 입상 물질의 마찰이 움직임을 방해한다.
"지하 운동의 가장 큰 도전은 반작용하는 힘이다"고 주 저자 University of California at Santa Barbara의 니콜라스 나클레리오(Nicholas Naclerio)가 설명했다. "지하를 통과하려면 흙, 모래 또는 기타 물질도 제거해야 한다." 또한 중력의 영향을 받는 알갱이의 움직임은 필연적으로 경로에서 수평 굴착을 산만하게 한다.
자연의 세 가지 솔루션
이러한 문제를 극복하기 위해 Naclerio와 그의 동료들은 지하 운동을 위해 자연이 개발한 전략을 살펴보았다. 그들은 식물의 뿌리 끝에서 첫 번째 원리를 발견했다.
이것은 토양을 통해 전체적으로 이동하지 않고 끝에서 새로운 세포를 형성할 뿐이다.
결과적으로 이 작은 영역만 주변 재료의 구속 마찰에 노출된다.
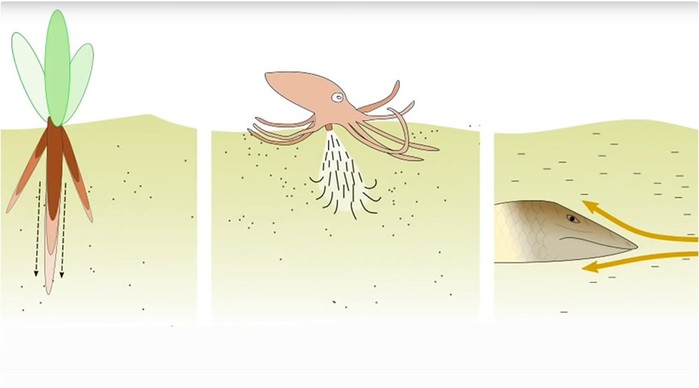 |
| ▲ 자연은 지하에서 효과적으로 이동하기 위해 세 가지 전략을 개발했다. © UC Santa Barbara/ Hawkes Lab |
두 번째 기술로 모래 문어(Octopus kaurna) 또는 모래 물고기(Trichodon trichodon)와 같은 동물의 전략을 사용했다. 그들은 퇴적물을 느슨하게 하여 매몰 저항을 감소시키는 물줄기를 방출한다. 세 번째 응용은 다른 것들 중에서 일부 땅을 파는 뱀이나 샌드피스 스킨크(Apothekerskink, Scincus scincus)에서 찾을 수 있다. 이 동물은 비대칭 머리를 가지고 있으며 위쪽으로 더 기울어져 있다. 이것은 수평으로 굴착할 때 위쪽으로 편향되는 경향을 상쇄한다.
 |
| ▲ 샌드피스 스킨크 scincus / Berns / Tiermotive.de |
와이어, 나일론 및 다량의 공기로 만든 로봇 웜
이 세 가지 전략을 기반으로 팀은 완전히 새로운 유형의 드릴링 로봇을 개발했다.
이것은 직경 6cm의 관형 와이어 프레임으로 구성되며 이중벽 나일론 커버가 안팎으로 이어진다.
 |
 |
 |
로봇은 안쪽으로 앞으로 움직이고 바깥쪽으로 뒤로 움직인다.
결과적으로, 공압 로봇은 새로운 덮개 재료를 뒤집음으로써 앞쪽에서 성장한 다음 뒤쪽에서 다시 안쪽으로 리디렉션된다. 이는 식물의 뿌리 끝의 성장을 모방하고 마찰을 줄인다.
굴착을 더 쉽게 하기 위해 굴착 로봇은 압축 공기를 분출할 수 있는 두 개의 노즐이 전면 끝에 있다. 드릴링 방향에 따라 이 공기 흐름은 앞으로 또는 아래로 향할 수 있다.
헤드의 비대칭 판금으로 인해 위쪽으로 편향되지 않고 수평 방향을 유지할 수 있다. 내부의 가는 와이어 "힘줄"이 제어를 담당한다.
두더지보다 빠름
초기 테스트는 이 굴착 로봇이 지하를 얼마나 효과적으로 굴착하는지 보여주었다.
여기에서 로봇 웜은 모래 속으로 35cm 깊이 파고 지하 거의 1m를 덮고 모래에 묻힌 여러 장애물을 둥글게 만들었다. Naclerio와 그의 팀은 “이는 로봇이 수직 및 수평으로 탐색하고 깊이를 제어하는 능력을 보여준다.
로봇 웜은 굴착하는 동안 초당 2센티미터의 속도에 도달했다. 이는 이전의 굴착 로봇보다 빠르다. "비교를 위해: 이전에 제어 가능한 굴착 로봇은 유리 구슬에서 0.11cm/s를 달성한 반면 뿌리처럼 움직이는 로봇은 0.0067cm/s에 도달했다"라고 연구원은 보고했다.
달과 소행성에서 사용 가능
과학자들에 따르면 로봇은 이 원리를 기반으로 완전히 새로운 응용 가능성을 열어준다.
관개용 호스나 전선용 파이프를 파고 지하에서 측정하거나 토양 샘플을 수집하는 데 사용할 수 있다. 예를 들어 모래가 많고 건조한 지역과 같이 지면이 느슨하고 너무 무겁지 않은 곳이면 어디에서나 작업할 수 있다.
로봇 웜은 또한 Naclerio와 그의 동료들이 설명하는 것처럼 소행성이나 달에서 발견되는 것과 같은 저중력 상태에서 땅을 파는데 매우 적합할 것이다. 그들은 이미 NASA와 함께 달의 지하 탐사용 로봇을 개발하는 프로젝트에 참여하고 있다.
(Science Robotics, 2021; doi: 10.1126/scirobotics.abe2922)
출처 : University of California – Santa Barbara
[더사이언스플러스=문광주 기자]
[저작권자ⓒ the SCIENCE plus. 무단전재-재배포 금지]







주요기사
+


많이 본 기사




Basic Science
+
AI & Tech
+
Photos
+






- the SCIENCE plus (04426) 서울시 용산구 이촌로 88길 30 대표전화 : 010-7145-3730 청소년보호관리책임자 : 문광주
- 발행인· 편집인 : 문광주 등록번호 : 경기 아52382 등록/발행일 : 2019-11-07 제보메일 : helloscienceplus@gmail.com
- 본 콘텐츠의 저작권은 the SCIENCE plus 또는 제공처에 있으며 이를 무단 이용하는 경우 저작권법 등에 따라 법적책임을 질 수 있습니다.
- Copyright ⓒ the SCIENCE plus All rights reserved. 0.0432