
















5'00"읽기
- 3D 인쇄를 사용해 수지, 이소말트(Isomalt) 및 기타 물질로 인쇄한 후크 구조
- 부착은 온도, 습도 및 빛과 같은 식물의 미기후(微氣候, microclimate)를 현장에서 모니터링
- 설탕 알코올 이소말트로 만든 마이크로 후크를 통해 잎의 표피 부드럽게 관통
- 야생의 지속적인 모바일 원격 모니터링을 가능케 한다.
갈퀴덩굴이라고도 하는 끈적끈적한 허브는 이름이 괜히 나온 것이 아니다.
과일, 줄기, 잎 전체에 작은 강모나 갈고리가 있어 식물이 다른 생물을 붙잡을 수 있도록 도와준다. 햇빛을 붙잡고 태양 아래서 자라기 위해 뻣뻣한 잎을 가진 끈적끈적한 허브는 거의 기생적으로 다른 식물에 달라붙는다. 연구자들은 이제 이 원리를 식물을 보호하는 데 사용하려고 한다.
EU가 자금을 지원하는 GrowBot 프로젝트의 일환으로 이탈리아 공과 대학의 과학자들은 끈적 끈적한 허브를 기반으로 한 일종의 반창고를 개발했다. 이 접착제 바닥에는 벨크로(찍찍이)와 유사한 마이크로 갈고리가 있다. 이 연구의 제1저자인 이사벨라 피오렐로(Isabella Fiorello)는 "이 마이크로 후크는 매우 다재다능하고 많은 응용 분야에 적용 가능하다"고 설명했다.
3D 프린터로 만든 반창고
인공 마이크로 갈고리를 개발하기 위해 과학자들은 먼저 천연 찹쌀 갈고리의 구조와 안정성을 분석했다. 그런 다음 그들은 3D 프린터를 사용해 이러한 접착 구조의 다양한 변형을 만들었다. 이것들이 인쇄되는 재료에 따라 다른 속성과 가능한 용도가 나타난다.
"부착은 온도, 습도 및 빛과 같은 식물의 미기후(微氣候, microclimate)를 현장에서 모니터링하거나 식물의 혈관계로 분자를 제어 방출하는 데 사용할 수 있다"고 Fiorello는 말했다. 후자는 설탕 알코올인 이소말트로 만든 마이크로 후크를 통해 발생한다. 이 물질의 도움으로 후크는 잎의 표피를 부드럽게 관통하고 식물의 혈관을 두드릴 수 있다.
연구자들은 보호제나 다른 물질을 식물에 국소적으로 그리고 직접적으로 투여할 수 있었다. 또 다른 장점은 Isomalt는 생분해성이며 흔적이나 폐기물을 남기지 않는다.
수지 후크 센서
이소말트 외에도 연구원들은 감광성 수지를 사용하여 마이크로 후크를 인쇄했다.
이러한 구조 덕분에 그들은 빛, 습도 및 온도에 대한 센서를 식물에 직접 부착할 수 있었다. 수지 후크는 직접 분해할 수 없지만 잎 표면을 손상시키지 않고 강력하게 고정한다.
"이것은 정밀 임업 및 농업에서 여러 응용 시나리오를 열어줍니다."라고 연구자들은 말한다.
"이 식물에서 영감을 받은 기술은 생태계에 대한 우리의 이해를 향상시켜 생태계의 섬세한 균형을 유지할 수 있다.“
연구원들은 수직 브래킷 모양의 마이크로 로봇도 개발했다.
끈적끈적한 잡초 갈고리로 잎 표면을 붙잡고 애벌레처럼 움직인다. 과학자들은 여기에서 여전히 많은 잠재력을 보고 있다. “기계는 자연 생태계, 심지어 접근하기 어려운 초목이 많은 지역에서도 사용될 수 있다. 그곳에서 그들은 야생의 지속적인 모바일 원격 모니터링을 가능하게 하기 위해 식물에 올라가 식물 사이에 고정할 수 있다.”
(Communications Materials, 2021; doi: 10.1038 / s43246-021-00208-0)
출처: Istituto Italiano di Tecnologia
- 3D 인쇄를 사용해 수지, 이소말트(Isomalt) 및 기타 물질로 인쇄한 후크 구조
- 부착은 온도, 습도 및 빛과 같은 식물의 미기후(微氣候, microclimate)를 현장에서 모니터링
- 설탕 알코올 이소말트로 만든 마이크로 후크를 통해 잎의 표피 부드럽게 관통
- 야생의 지속적인 모바일 원격 모니터링을 가능케 한다.
식물 모델을 기반으로 한 마이크로 갈고리(후크)
갈퀴 덩굴식물의 접착 구조에서 영감을 얻은 새로운 유형의 센서
과학자들이 새로운 유형의 마이크로 후크에 대한 모델로 갈퀴 덩굴 식물의 접착 구조를 채택했다. 3D 인쇄를 사용해 수지, 이소말트(Isomalt) 및 기타 물질로 인쇄한 후크 구조는 손상 없이 잎 표면에 부착돼 다양한 용도로 사용할 수 있다. 그들은 잎에 식물 모니터링을 위한 센서를 붙잡고 식물에 보호 제품을 관리하거나 심지어 미니 로봇이 잎을 기어 다니게 한다.
 |
| ▲ 마이크로 후크로 물질을 식물 잎에 직접 투여할 수 있다. © Istituto Italiano di Tecnologia |
갈퀴덩굴이라고도 하는 끈적끈적한 허브는 이름이 괜히 나온 것이 아니다.
과일, 줄기, 잎 전체에 작은 강모나 갈고리가 있어 식물이 다른 생물을 붙잡을 수 있도록 도와준다. 햇빛을 붙잡고 태양 아래서 자라기 위해 뻣뻣한 잎을 가진 끈적끈적한 허브는 거의 기생적으로 다른 식물에 달라붙는다. 연구자들은 이제 이 원리를 식물을 보호하는 데 사용하려고 한다.
EU가 자금을 지원하는 GrowBot 프로젝트의 일환으로 이탈리아 공과 대학의 과학자들은 끈적 끈적한 허브를 기반으로 한 일종의 반창고를 개발했다. 이 접착제 바닥에는 벨크로(찍찍이)와 유사한 마이크로 갈고리가 있다. 이 연구의 제1저자인 이사벨라 피오렐로(Isabella Fiorello)는 "이 마이크로 후크는 매우 다재다능하고 많은 응용 분야에 적용 가능하다"고 설명했다.
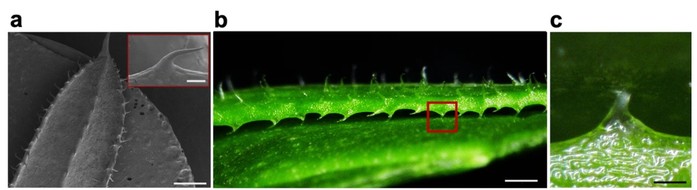 |
| ▲ 그림 1: 자연에서 식물 잎을 위한 인공 MH 기반 고정 장치로 응용. G. aparine 자연 주축 잎 측면(축척 막대, 1 mm)의 SEM 이미지와 자연 축축 마이크로후크(삽입, 눈금 막대, 150 μm)의 클로즈업. b, c 기주 식물에 있는 G. aparine 잎의 디지털 현미경 이미지(스케일 막대, 500 µm) 및 잎 표면과 맞물리는 자연 축방향 마이크로후크(스케일 막대, 200 µm)에 각각 초점을 맞춘다. (출처: 관련논문 Fig 1, Plant-like hooked miniature machines for on-leaf sensing and delivery) |
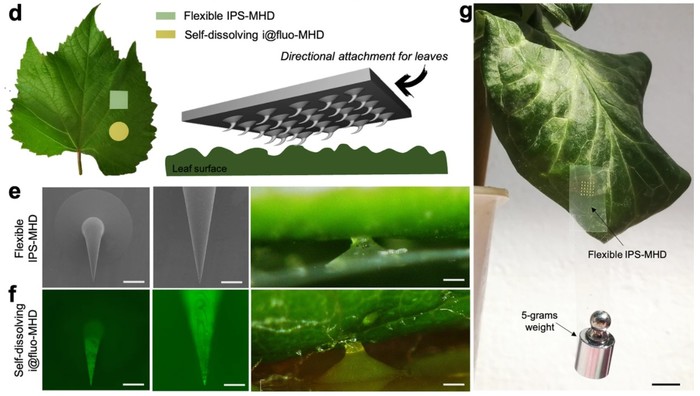 |
| ▲ 그림 1. d 잎에 MH 기반 방향 부착 시스템. e 유연한 IPS 제작 MH 기반 장치(IPS-MHD)의 인공 후크와 잎 표면과의 연동(왼쪽 SEM 이미지). 눈금 막대, 각각 100 및 25 µm; 오른쪽의 디지털 현미경 이미지, 눈금 막대, 100 µm). f 자가 용해 isomalt@fluorescein-made MH 기반 장치(i@fluo-MHDs)의 인공 갈고리 및 잎 표면과의 연동(왼쪽의 형광 이미지. 눈금 막대, 각각 200 및 50 µm, 오른쪽 디지털 현미경 이미지 , 스케일 바, 200 µm). g IPS-MHD를 사용하여 Arum italicum 잎에 대한 방향 부착 시연(즉, 5g의 무게 유지). 눈금 막대: 1 cm. (출처 : 관련논문 Plant-like hooked miniature machines for on-leaf sensing and delivery) |
3D 프린터로 만든 반창고
인공 마이크로 갈고리를 개발하기 위해 과학자들은 먼저 천연 찹쌀 갈고리의 구조와 안정성을 분석했다. 그런 다음 그들은 3D 프린터를 사용해 이러한 접착 구조의 다양한 변형을 만들었다. 이것들이 인쇄되는 재료에 따라 다른 속성과 가능한 용도가 나타난다.
"부착은 온도, 습도 및 빛과 같은 식물의 미기후(微氣候, microclimate)를 현장에서 모니터링하거나 식물의 혈관계로 분자를 제어 방출하는 데 사용할 수 있다"고 Fiorello는 말했다. 후자는 설탕 알코올인 이소말트로 만든 마이크로 후크를 통해 발생한다. 이 물질의 도움으로 후크는 잎의 표피를 부드럽게 관통하고 식물의 혈관을 두드릴 수 있다.
연구자들은 보호제나 다른 물질을 식물에 국소적으로 그리고 직접적으로 투여할 수 있었다. 또 다른 장점은 Isomalt는 생분해성이며 흔적이나 폐기물을 남기지 않는다.
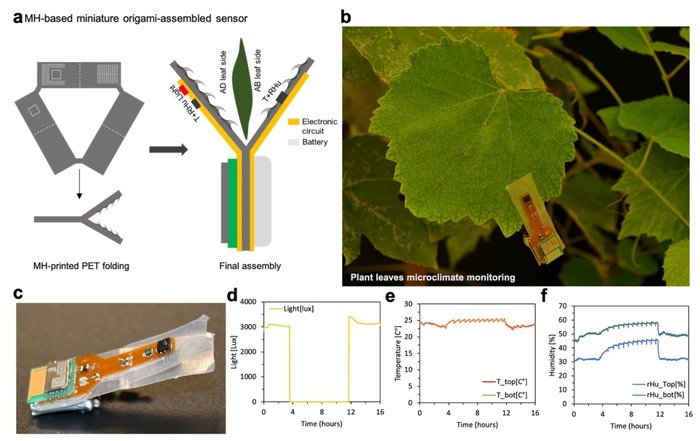 |
| ▲ 그림 3: 유연한 IPS-MHD로 만든 환경 기계. a microprinted 후크, 전자 회로, 센서 및 배터리를 포함하는 완전히 통합된 종이접기 조립 장치. b, c 잎 미기후 모니터링을 위한 MH 기반 센서의 사진. d–f 16 h 동안 성장 챔버 조건에서 V. lambrusca 잎의 빛, 온도 및 습도 매개변수 모니터링 결과를 플로팅합니다. 온도 및 습도 매개변수는 축방향 및 축방향 V. lambrusca 잎 측면 모두에 대해 보고된다. (출처: 관련논문 Plant-like hooked miniature machines for on-leaf sensing and delivery) |
수지 후크 센서
이소말트 외에도 연구원들은 감광성 수지를 사용하여 마이크로 후크를 인쇄했다.
이러한 구조 덕분에 그들은 빛, 습도 및 온도에 대한 센서를 식물에 직접 부착할 수 있었다. 수지 후크는 직접 분해할 수 없지만 잎 표면을 손상시키지 않고 강력하게 고정한다.
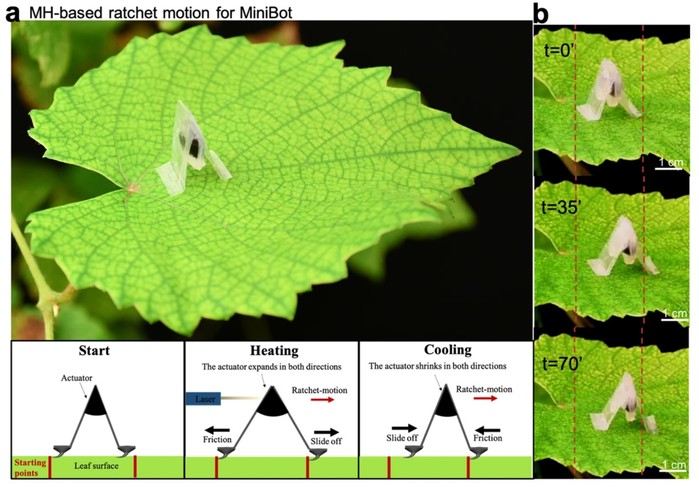 |
| ▲ 그림 5: 미니어처 로봇(MH 기반 MiniBot)에 내장된 MH 구조를 통해 잎 표면에서 래칫과 같은 모션의 개념 증명 데모. V. lambrusca 잎 위의 MH 기반 MiniBot. 삽입: 가벼운 구동, 저중량 MiniBot의 발에 인쇄된 MH에 의해 활성화된 연동 메커니즘. 808 nm 레이저가 액추에이터에 닿으면 액추에이터가 확장되고 뒷발의 MH가 잎 표면과 마찰을 만든다. 동시에 앞발의 후크가 떨어져서 시위자가 앞으로 이동할 수 있게 하고 뒤로 움직이는 것을 차단한다. 레이저 오프 단계에서 유체 액추에이터가 냉각되면 수축한다. 그런 다음 앞발의 MH는 액추에이터를 확장하는 동안 얻은 위치에 유지하기에 충분한 마찰을 연동 및/또는 생성하는 반면 뒷발의 후크는 앞으로 미끄러져 로봇의 잎 위 이동을 가능하게 한다. b V. lambrusca 잎에서 MH 기반 MiniBot의 전진 동작을 보여주는 다른 시점의 단일 프레임. (출처: 관련 논문 Plant-like hooked miniature machines for on-leaf sensing and delivery) |
"이것은 정밀 임업 및 농업에서 여러 응용 시나리오를 열어줍니다."라고 연구자들은 말한다.
"이 식물에서 영감을 받은 기술은 생태계에 대한 우리의 이해를 향상시켜 생태계의 섬세한 균형을 유지할 수 있다.“
연구원들은 수직 브래킷 모양의 마이크로 로봇도 개발했다.
끈적끈적한 잡초 갈고리로 잎 표면을 붙잡고 애벌레처럼 움직인다. 과학자들은 여기에서 여전히 많은 잠재력을 보고 있다. “기계는 자연 생태계, 심지어 접근하기 어려운 초목이 많은 지역에서도 사용될 수 있다. 그곳에서 그들은 야생의 지속적인 모바일 원격 모니터링을 가능하게 하기 위해 식물에 올라가 식물 사이에 고정할 수 있다.”
(Communications Materials, 2021; doi: 10.1038 / s43246-021-00208-0)
출처: Istituto Italiano di Tecnologia
[더사이언스플러스=문광주 기자]
[저작권자ⓒ the SCIENCE plus. 무단전재-재배포 금지]







주요기사
+


많이 본 기사




Basic Science
+
AI & Tech
+
Photos
+






- the SCIENCE plus (04426) 서울시 용산구 이촌로 88길 30 대표전화 : 010-7145-3730 청소년보호관리책임자 : 문광주
- 발행인· 편집인 : 문광주 등록번호 : 경기 아52382 등록/발행일 : 2019-11-07 제보메일 : helloscienceplus@gmail.com
- 본 콘텐츠의 저작권은 the SCIENCE plus 또는 제공처에 있으며 이를 무단 이용하는 경우 저작권법 등에 따라 법적책임을 질 수 있습니다.
- Copyright ⓒ the SCIENCE plus All rights reserved. 0.0885