
















3'10" 읽기 + 4'51" 영상
- AI 시스템 Swift는 먼저 시뮬레이터에서 경로 훈련
- 드론은 장애물 코스를 탐색할 때 시속 100km가 넘는 속도에 도달
- Swift는 인간 조종사가 설정한 최고 기록보다 0.5초 앞선 가장 빠른 랩을 기록
인공지능은 오랫동안 인간만이 통제할 수 있는 많은 영역에 침투해 왔다. AI 시스템은 전략과 비디오 게임에서 우리를 이길 수 있고, 프로그래밍할 수 있고, 단백질의 접힘 코드를 해독하고, 시와 텍스트를 쓰고, 심지어 창의성을 보여줄 수도 있다. 지금까지 순수 디지털 분야에서 최고의 성과를 보여왔다. AI 시스템을 로봇과 드론에 통합하는 데 있어서는 아직 개발이 뒤처져 있다.
AI가 드론을 조종한다.
그러나 상황이 바뀌기 시작했다. 이제 AI 시스템이 세계적 수준의 드론 경주에서 처음으로 인간 챔피언을 이겼다. 인공지능 '스위프트'가 1인칭 시점 드론 경주에서 세계 챔피언 3명을 물리쳤다. 조종사는 온보드 카메라에 연결된 헤드셋을 통해 쿼드로콥터를 제어한다. 드론은 장애물 코스를 탐색할 때 시속 100km가 넘는 속도에 도달한다.
“신체 스포츠는 보드나 비디오 게임보다 예측 가능성이 낮기 때문에 AI에게 더 도전적이다. AI는 물리적 세계와의 상호작용을 통해 이를 연습해야 한다”고 취리히 대학의 선임 저자 Davide Scaramuzza는 설명했다. 2017년까지만 해도 AI 시스템은 인간 조종사에게 패배했다. 일반 자율 드론은 외부 위치 확인 시스템에 의존하지 않는 한 경로를 이동하는 데 인간 조종 드론보다 두 배나 더 오랜 시간이 걸리는 경우가 많다.
처음에는 연결된 신경망
취리히 연구진이 인텔과 협력하여 개발한 드론 AI Swift는 탑재된 카메라로 수집한 데이터에 실시간으로 반응한다. 통합 관성 측정 장치는 가속도와 속도도 측정한다. 그러면 AI 시스템의 신경망이 카메라 데이터를 사용해 우주에서 드론의 위치를 파악하고 경주 트랙을 따라 게이트를 인식한다.
이 정보는 역시 심층신경망을 기반으로 하는 AI 제어장치에 전달된다. AI는 가능한 한 빨리 경로를 완료하기 위해 최선의 조치를 선택한다. 스카라무짜(Scaramuzza)는 “이 알고리즘은 드론의 한계를 진정으로 존중하면서 가장 빠른 궤적을 생성하는 최초의 알고리즘이다”고 말했다.
시뮬레이터에서의 훈련
드론 AI가 인간 상대와의 경주에서 경쟁하기 전에 실제 쿼드콥터가 지속적으로 충돌, 충돌 및 파괴되지 않도록 시뮬레이션 환경에서 먼저 훈련되었다. 수석 저자인 취리히 대학의 엘리아 카우프만((Elia Kaufmann)은 "시뮬레이터의 동작 결과가 실제 세계의 동작 결과와 최대한 유사하도록 하기 위해 실제 데이터로 시뮬레이터를 최적화하는 방법을 개발했다"고 말했다.
훈련 단계에서는 소위 강화 학습이 사용되었다. 드론은 먼저 외부 위치 확인 시스템을 사용하여 경로를 비행하는 동시에 카메라의 데이터를 기록했다. 두 데이터 스트림을 지속적으로 비교함으로써 AI는 온보드 카메라와 센서 데이터를 해석할 때 발생한 오류를 수정하는 방법을 배웠다.
곡예적인 고속 비행 기동
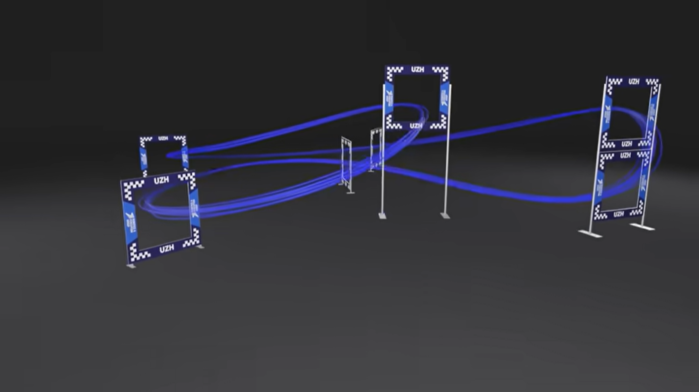
드론 AI는 1인칭 시점 드론 경주에서 3명의 세계적 수준의 챔피언인 2019 드론 레이싱 리그 챔피언 Alex Vanover, 2019 MultiGP 드론 레이싱 챔피언 Thomas Bitmatta 및 3회 스위스 챔피언 Marvin과 경쟁했다. 셰퍼. 경주는 취리히 근처 뒤벤도르프 공항의 격납고에서 진행되었으며, 랩을 완료하려면 올바른 순서로 통과해야 하는 7개의 정사각형 게이트가 있는 25 x 25 미터의 면적을 차지했다.
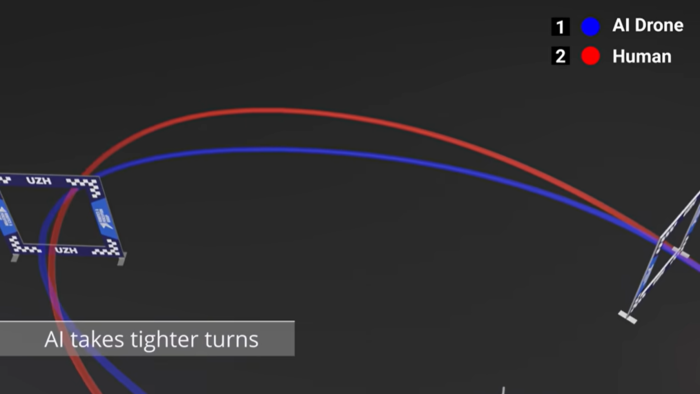
코스를 완주하기 위해 드론은 최고 속도로 하프롤링을 하고 하강 하프루프를 수행하는 곡예 운동인 스플릿-S(split-S)를 포함한 까다로운 기동을 수행해야 했다. 전반적으로 Swift는 인간 조종사가 설정한 최고 기록보다 0.5초 앞선 가장 빠른 랩을 기록했다. 그러나 훈련받은 환경과 비교하여 조건이 바뀌면 위협 AI가 뒤쳐졌다. AI는 아직 인간 경쟁자만큼 적응력이 없다.
빠른 자율 드론은 영화의 액션 장면을 포착하는 데에도 사용될 수 있습니다. 연구원은 "마지막으로 빠른 비행 속도는 구조 작업에서 결정적인 차이를 만들 수 있다. 예를 들어 드론이 불타는 건물로 보내질 때"라고 말했다.
(nature, 2023; doi: 10.1038/s41586-023-06419-4)
출처: Universität Zürich
- AI 시스템 Swift는 먼저 시뮬레이터에서 경로 훈련
- 드론은 장애물 코스를 탐색할 때 시속 100km가 넘는 속도에 도달
- Swift는 인간 조종사가 설정한 최고 기록보다 0.5초 앞선 가장 빠른 랩을 기록
드론 경주에서 AI가 인간을 이겼다.
인공지능이 세계적 수준의 드론 조종사를 물리쳤다.
자율 드론은 오랫동안 사용되어 왔지만 일반적으로 상대적으로 느리다. 그러나 이제 연구자들은 경주에서 세계적 수준의 드론 조종사도 이길 수 있는 인공지능을 개발했다. AI 시스템 Swift는 조종사보다 빠르게 경주 코스와 장애물을 완료하기 위해 온보드 카메라와 센서에서 제공하는 정보만 필요하지만 먼저 시뮬레이터에서 경로를 훈련해야 한다.
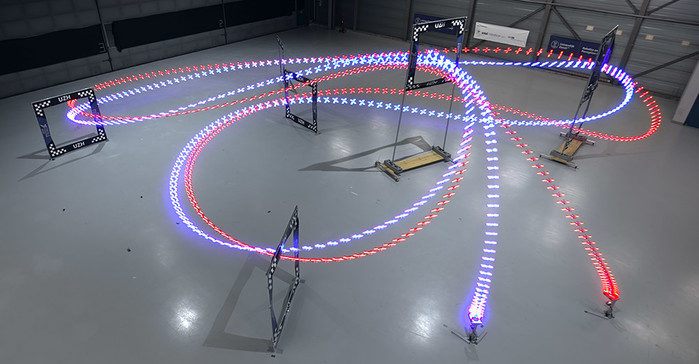 |
| ▲ 이 빛 트레일은 1인칭 드론 경주의 드론에서 나온 것이다. 이번 게임에서는 AI 시스템이 세계적 수준의 인간 조종사를 물리쳤다. © Leonard Bauersfeld/ UZH |
인공지능은 오랫동안 인간만이 통제할 수 있는 많은 영역에 침투해 왔다. AI 시스템은 전략과 비디오 게임에서 우리를 이길 수 있고, 프로그래밍할 수 있고, 단백질의 접힘 코드를 해독하고, 시와 텍스트를 쓰고, 심지어 창의성을 보여줄 수도 있다. 지금까지 순수 디지털 분야에서 최고의 성과를 보여왔다. AI 시스템을 로봇과 드론에 통합하는 데 있어서는 아직 개발이 뒤처져 있다.
AI가 드론을 조종한다.
그러나 상황이 바뀌기 시작했다. 이제 AI 시스템이 세계적 수준의 드론 경주에서 처음으로 인간 챔피언을 이겼다. 인공지능 '스위프트'가 1인칭 시점 드론 경주에서 세계 챔피언 3명을 물리쳤다. 조종사는 온보드 카메라에 연결된 헤드셋을 통해 쿼드로콥터를 제어한다. 드론은 장애물 코스를 탐색할 때 시속 100km가 넘는 속도에 도달한다.
 |
 |
“신체 스포츠는 보드나 비디오 게임보다 예측 가능성이 낮기 때문에 AI에게 더 도전적이다. AI는 물리적 세계와의 상호작용을 통해 이를 연습해야 한다”고 취리히 대학의 선임 저자 Davide Scaramuzza는 설명했다. 2017년까지만 해도 AI 시스템은 인간 조종사에게 패배했다. 일반 자율 드론은 외부 위치 확인 시스템에 의존하지 않는 한 경로를 이동하는 데 인간 조종 드론보다 두 배나 더 오랜 시간이 걸리는 경우가 많다.
처음에는 연결된 신경망
취리히 연구진이 인텔과 협력하여 개발한 드론 AI Swift는 탑재된 카메라로 수집한 데이터에 실시간으로 반응한다. 통합 관성 측정 장치는 가속도와 속도도 측정한다. 그러면 AI 시스템의 신경망이 카메라 데이터를 사용해 우주에서 드론의 위치를 파악하고 경주 트랙을 따라 게이트를 인식한다.
이 정보는 역시 심층신경망을 기반으로 하는 AI 제어장치에 전달된다. AI는 가능한 한 빨리 경로를 완료하기 위해 최선의 조치를 선택한다. 스카라무짜(Scaramuzza)는 “이 알고리즘은 드론의 한계를 진정으로 존중하면서 가장 빠른 궤적을 생성하는 최초의 알고리즘이다”고 말했다.
시뮬레이터에서의 훈련
드론 AI가 인간 상대와의 경주에서 경쟁하기 전에 실제 쿼드콥터가 지속적으로 충돌, 충돌 및 파괴되지 않도록 시뮬레이션 환경에서 먼저 훈련되었다. 수석 저자인 취리히 대학의 엘리아 카우프만((Elia Kaufmann)은 "시뮬레이터의 동작 결과가 실제 세계의 동작 결과와 최대한 유사하도록 하기 위해 실제 데이터로 시뮬레이터를 최적화하는 방법을 개발했다"고 말했다.
훈련 단계에서는 소위 강화 학습이 사용되었다. 드론은 먼저 외부 위치 확인 시스템을 사용하여 경로를 비행하는 동시에 카메라의 데이터를 기록했다. 두 데이터 스트림을 지속적으로 비교함으로써 AI는 온보드 카메라와 센서 데이터를 해석할 때 발생한 오류를 수정하는 방법을 배웠다.
곡예적인 고속 비행 기동
드론 AI는 1인칭 시점 드론 경주에서 3명의 세계적 수준의 챔피언인 2019 드론 레이싱 리그 챔피언 Alex Vanover, 2019 MultiGP 드론 레이싱 챔피언 Thomas Bitmatta 및 3회 스위스 챔피언 Marvin과 경쟁했다. 셰퍼. 경주는 취리히 근처 뒤벤도르프 공항의 격납고에서 진행되었으며, 랩을 완료하려면 올바른 순서로 통과해야 하는 7개의 정사각형 게이트가 있는 25 x 25 미터의 면적을 차지했다.
 |
| ▲ 세계적 수준의 3명 드론 조종사 |
코스를 완주하기 위해 드론은 최고 속도로 하프롤링을 하고 하강 하프루프를 수행하는 곡예 운동인 스플릿-S(split-S)를 포함한 까다로운 기동을 수행해야 했다. 전반적으로 Swift는 인간 조종사가 설정한 최고 기록보다 0.5초 앞선 가장 빠른 랩을 기록했다. 그러나 훈련받은 환경과 비교하여 조건이 바뀌면 위협 AI가 뒤쳐졌다. AI는 아직 인간 경쟁자만큼 적응력이 없다.
<인간과의 AI 드론 경주 © UZH 로봇 공학 및 인식 그룹>
실제 사용
연구원들에 따르면, 이러한 드론 AI와 빠른 비행 능력은 단순한 특수 효과 그 이상이다. 또한 기존 자율 드론에 비해 매우 실용적인 이점을 가질 수 있다. “더 빨리 비행하면 유용성이 높아진다. 숲 모니터링이나 우주 탐험과 같은 응용 분야에서는 짧은 시간에 넓은 지역을 커버하는 것이 중요하다”고 Scaramuzza는 설명했다.빠른 자율 드론은 영화의 액션 장면을 포착하는 데에도 사용될 수 있습니다. 연구원은 "마지막으로 빠른 비행 속도는 구조 작업에서 결정적인 차이를 만들 수 있다. 예를 들어 드론이 불타는 건물로 보내질 때"라고 말했다.
(nature, 2023; doi: 10.1038/s41586-023-06419-4)
출처: Universität Zürich
[더사이언스플러스=문광주 기자]
[저작권자ⓒ the SCIENCE plus. 무단전재-재배포 금지]







주요기사
+



많이 본 기사




Basic Science
+

AI & Tech
+
Photos
+






- the SCIENCE plus (04426) 서울시 용산구 이촌로 88길 30 대표전화 : 010-7145-3730 청소년보호관리책임자 : 문광주
- 발행인· 편집인 : 문광주 등록번호 : 경기 아52382 등록/발행일 : 2019-11-07 제보메일 : helloscienceplus@gmail.com
- 본 콘텐츠의 저작권은 the SCIENCE plus 또는 제공처에 있으며 이를 무단 이용하는 경우 저작권법 등에 따라 법적책임을 질 수 있습니다.
- Copyright ⓒ the SCIENCE plus All rights reserved. 0.0492