
















3'00"+ 5'38"영상
* 새로운 실험실 모듈과 11미터 길이의 로봇 팔이 현재 국제 우주 정거장 ISS로 이동 중
* 최대 8톤의 화물을 운송하고 5mm 정확도 원격으로 위치 변경
* 7월 29일 도킹 및 설치 계획
우주비행사들이 처음 국제우주정거장으로 이동한 지 21년이 지났다.
이 기간 국제 연구 위치는 특히 미래의 달과 화성 유인 비행에 대해 우주에서 많은 귀중한 데이터를 제공했다. 이 우주 정거장에서 우주에서의 장기 체류가 인간의 건강에 미치는 영향을 테스트하는 데 사용될 수 있기 때문이다. 궤도 실험 또한 무중력 상태에서 물질, 생물학적 세포 혹은 불의 움직임도 알 수 있다.
새로운 실험실 모듈 및 세 번째 팔
이제 국제 우주 정거장이 성장하고 있다.
2021년 7월 21일, 바이코누르(Baikonur) 우주기지의 러시아 양성자-로켓이 ISS를 위한 두 가지 새로운 구성 요소를 궤도에 올렸다. 그중 하나가 러시아의 실험실 모듈인 나우카(Nauka)다. 오랜 기간 계획되어 공사가 잠시 중단된 후 완공됐다. 13미터 길이와 20톤의 무거운 실험실 모듈은 스테이션의 러시아 부분에서 실험을 위한 더 많은 공간을 제공하고 스테이션에 추가 구동 노즐을 제공한다.
11미터 길이의 유럽 로봇 팔 ERA도 수송 로켓에 탑재되어 있다.
최대 8톤의 부품을 운송하고 5mm의 정확도로 원하는 위치에 내려놓을 수 있다.
또한 현장 작업 중에 우주비행사를 한 작업 장소에서 다른 작업 장소로 수송해야 한다.
스테이션에 있는 두 개의 기존 로봇 팔과 달리 ERA는 주로 ISS의 러시아 부분을 공급한다. 이를 위해 암은 새로운 Nauka 실험실 모듈의 외부에 부착된다.
ERA는 양쪽 끝을 잡고 놓을 수 있다.
ESA의 우주 및 로봇 탐사 책임자인 데이빗 파커(David Parker)는 "러시아 정거장을 통과하는 유럽 로봇 팔은 더 많은 자유도, 유연성 및 기능으로 우주 작전을 풍요롭게 할 것이다"고 말했다.
ERA를 사용하면 양쪽 끝이 ‘손’ 또는 기본 역할을 할 수 있기 때문이다. 이는 로봇 팔이 고정 장치를 유연하게 변경하고 스테이션 위로 이동하며 위치를 변경할 수 있다는 의미다.
"무엇보다도 ERA는 우주 비행사를 외부에 배치할 필요 없이 우주 정거장 내부에서 외부로 직접 작은 탑재량을 가져오는 역할을 한다"고 ESA는 설명했다. 로봇 팔은 또한 4개의 적외선 카메라를 사용해 우주비행사를 작업 장소로 데려오거나 스테이션의 외부 쉘 또는 외부 작업을 모니터링할 수 있다. ERA는 또한 많은 작업을 자동 또는 반자동으로 수행해야 하지만 외부 및 내부에서 원격으로 제어할 수도 있다.
우주 정거장에서의 첫해에 ERA의 주요 책임은 대형 라디에이터를 설치하고 Nauka를 위한 에어록(Air lock)을 설정하는 것이다.
7월 29일 도킹 및 설치
새로운 로봇 팔은 엔진이 장착된 새 모듈이 200km 높이의 현재 궤도에서 약 400km 떨어진 ISS 궤도로 들어올 때까지 7월 29일까지 설치되지 않는다. 약 8일이 소요된다.
러시아 Zvezda 모듈과의 도킹을 준비하려면 먼저 이전 Pirs 도킹 및 종료 모듈을 분리해야 한다. 이것은 곧 대기 중에서 불타게 될 것이다.
5개의 현장 임무를 수행하는 동안 우주비행사는 팔의 잠금을 해제하고 기능과 통신을 테스트하고 ERA의 "팔꿈치"에 두 대의 카메라를 추가로 부착한다.
현재 임무는 ISS를 갱신하고 수명을 연장하는 프로그램의 일부다.
Parker는 "우주에 있는 우리의 본거지는 지속적으로 최적화되고 있다"며 "우리의 Columbus 2030 프로그램을 통해 우리는 궤도에서 20년 만에 우주 정거장에 '중년의 업그레이드'를 제공하고 있다"고 설명했다.
이를 위해 유럽 콜럼버스 실험실 모듈은 새로운 과학 랙(rack), 초고속 데이터 연결 및 상용 플랫폼으로 보완된다.
출처: ESA
* 새로운 실험실 모듈과 11미터 길이의 로봇 팔이 현재 국제 우주 정거장 ISS로 이동 중
* 최대 8톤의 화물을 운송하고 5mm 정확도 원격으로 위치 변경
* 7월 29일 도킹 및 설치 계획
우주정거장 ISS에 사용할 새로운 로봇 팔
유럽의 로봇 팔은 스테이션 위로 매달리며 러시아 부품을 공급할 수 있다.
ISS를 위한 새로운 추가 사항:
새로운 실험실 모듈과 11미터 길이의 로봇 팔이 현재 국제 우주 정거장 ISS로 가는 중이다. 유럽 로봇 팔 ERA는 스테이션의 러시아 부분에도 도달할 수 있는 첫 번째가 될 것이다.
이는 최대 8톤의 화물을 운송하고 원격으로 위치를 변경할 수 있다. 러시아 실험실 모듈 Nauka는 실험을 위한 추가 공간과 공기 잠금 장치를 제공한다.
 |
▲ ISS는 양쪽 끝을 고정하거나 잡을 수 있는 새로운 로봇 팔을 장착한다. 그는 새로운 러시아 모듈 Nauka에 배치된다. © ESA |
우주비행사들이 처음 국제우주정거장으로 이동한 지 21년이 지났다.
이 기간 국제 연구 위치는 특히 미래의 달과 화성 유인 비행에 대해 우주에서 많은 귀중한 데이터를 제공했다. 이 우주 정거장에서 우주에서의 장기 체류가 인간의 건강에 미치는 영향을 테스트하는 데 사용될 수 있기 때문이다. 궤도 실험 또한 무중력 상태에서 물질, 생물학적 세포 혹은 불의 움직임도 알 수 있다.
새로운 실험실 모듈 및 세 번째 팔
이제 국제 우주 정거장이 성장하고 있다.
2021년 7월 21일, 바이코누르(Baikonur) 우주기지의 러시아 양성자-로켓이 ISS를 위한 두 가지 새로운 구성 요소를 궤도에 올렸다. 그중 하나가 러시아의 실험실 모듈인 나우카(Nauka)다. 오랜 기간 계획되어 공사가 잠시 중단된 후 완공됐다. 13미터 길이와 20톤의 무거운 실험실 모듈은 스테이션의 러시아 부분에서 실험을 위한 더 많은 공간을 제공하고 스테이션에 추가 구동 노즐을 제공한다.
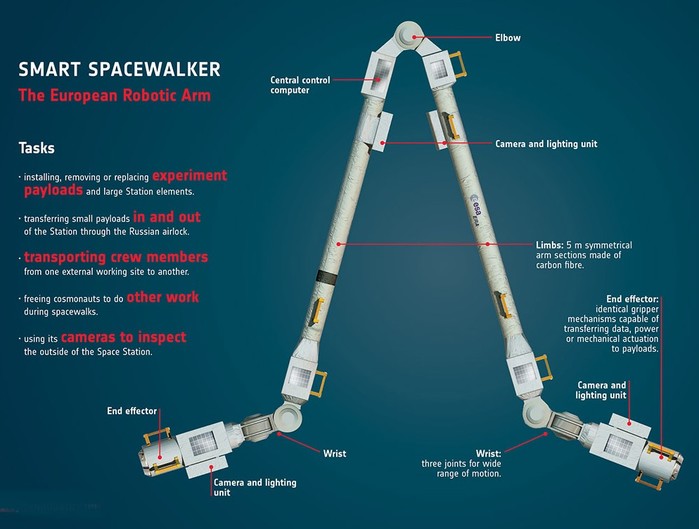 |
| ▲ 로봇팔 ERA의 장비 및 작업 © ESA |
11미터 길이의 유럽 로봇 팔 ERA도 수송 로켓에 탑재되어 있다.
최대 8톤의 부품을 운송하고 5mm의 정확도로 원하는 위치에 내려놓을 수 있다.
또한 현장 작업 중에 우주비행사를 한 작업 장소에서 다른 작업 장소로 수송해야 한다.
스테이션에 있는 두 개의 기존 로봇 팔과 달리 ERA는 주로 ISS의 러시아 부분을 공급한다. 이를 위해 암은 새로운 Nauka 실험실 모듈의 외부에 부착된다.
 |
 |
 |
ERA는 양쪽 끝을 잡고 놓을 수 있다.
ESA의 우주 및 로봇 탐사 책임자인 데이빗 파커(David Parker)는 "러시아 정거장을 통과하는 유럽 로봇 팔은 더 많은 자유도, 유연성 및 기능으로 우주 작전을 풍요롭게 할 것이다"고 말했다.
ERA를 사용하면 양쪽 끝이 ‘손’ 또는 기본 역할을 할 수 있기 때문이다. 이는 로봇 팔이 고정 장치를 유연하게 변경하고 스테이션 위로 이동하며 위치를 변경할 수 있다는 의미다.
"무엇보다도 ERA는 우주 비행사를 외부에 배치할 필요 없이 우주 정거장 내부에서 외부로 직접 작은 탑재량을 가져오는 역할을 한다"고 ESA는 설명했다. 로봇 팔은 또한 4개의 적외선 카메라를 사용해 우주비행사를 작업 장소로 데려오거나 스테이션의 외부 쉘 또는 외부 작업을 모니터링할 수 있다. ERA는 또한 많은 작업을 자동 또는 반자동으로 수행해야 하지만 외부 및 내부에서 원격으로 제어할 수도 있다.
우주 정거장에서의 첫해에 ERA의 주요 책임은 대형 라디에이터를 설치하고 Nauka를 위한 에어록(Air lock)을 설정하는 것이다.
7월 29일 도킹 및 설치
새로운 로봇 팔은 엔진이 장착된 새 모듈이 200km 높이의 현재 궤도에서 약 400km 떨어진 ISS 궤도로 들어올 때까지 7월 29일까지 설치되지 않는다. 약 8일이 소요된다.
러시아 Zvezda 모듈과의 도킹을 준비하려면 먼저 이전 Pirs 도킹 및 종료 모듈을 분리해야 한다. 이것은 곧 대기 중에서 불타게 될 것이다.
<국제 우주 정거장에서 사용할 새로운 유럽 로봇 팔. © ESA>
5개의 현장 임무를 수행하는 동안 우주비행사는 팔의 잠금을 해제하고 기능과 통신을 테스트하고 ERA의 "팔꿈치"에 두 대의 카메라를 추가로 부착한다.
현재 임무는 ISS를 갱신하고 수명을 연장하는 프로그램의 일부다.
Parker는 "우주에 있는 우리의 본거지는 지속적으로 최적화되고 있다"며 "우리의 Columbus 2030 프로그램을 통해 우리는 궤도에서 20년 만에 우주 정거장에 '중년의 업그레이드'를 제공하고 있다"고 설명했다.
이를 위해 유럽 콜럼버스 실험실 모듈은 새로운 과학 랙(rack), 초고속 데이터 연결 및 상용 플랫폼으로 보완된다.
출처: ESA
[더사이언스플러스=문광주 기자]
[저작권자ⓒ the SCIENCE plus. 무단전재-재배포 금지]







주요기사
+



많이 본 기사





Basic Science
+

AI & Tech
+
Photos
+






- the SCIENCE plus (04426) 서울시 용산구 이촌로 88길 30 대표전화 : 010-7145-3730 청소년보호관리책임자 : 문광주
- 발행인· 편집인 : 문광주 등록번호 : 경기 아52382 등록/발행일 : 2019-11-07 제보메일 : helloscienceplus@gmail.com
- 본 콘텐츠의 저작권은 the SCIENCE plus 또는 제공처에 있으며 이를 무단 이용하는 경우 저작권법 등에 따라 법적책임을 질 수 있습니다.
- Copyright ⓒ the SCIENCE plus All rights reserved. 1.5000