
















* 전기 유압식 조인트는 빠르고 강하고 가볍게 한다.
* Softbot 조인트는 70도까지 구부릴 수 있으며 이를 위해 12~30 밀리 초 만 필요
* 작은 거미 로봇이 키의 14배를 공중으로 뛰어올 수 있도록 충분한 힘, 인간 근육 출력 근접
* 에너지를 거의 사용하지 않으며 제조 쉽고 저렴. 식품 포장에도 사용되는 플라스틱 사용
아라크노-봇(Arachno-Bot) : 거미 모델을 기반으로 한 로봇 구동
전기 유압식 조인트는 소프트 로봇을 빠르고 강하고 가벼워지게 한다.
자연에서 모방 :
거미의 독특한 관절 시스템은 이제 로봇에게 더 많은 속도, 가벼움 및 힘을 제공한다.
연구자들은 최근 거미 모형에서 전자 유압식 관절이 작동하는 부드러운 로봇과 로봇 손을 쥐고 있기 때문이다. 그 결과, 선조 세공 구조 임에도 불구하고 로봇은 신체 크기보다 10배 더 많이 점프 할 수 있지만 깨지기 쉬운 물체를 파괴하지 않고 잡을 수도 있다.
 |
▲ 이 Arachnobot은 거미 모델을 기반으로 하는 관절식 드라이브를 사용해 자신의 높이의 14배를 점프할 수 있다. © MPI für Intelligente Systeme |
소프트 봇이 증가하고 있다.
점점 더 많은 로봇이 단단한 금속 부품 대신 유연한 폴리머와 자연 기능 원리를 사용하고 있다. 과학자들은 이미 문어 모델, 심해어 로봇 또는 거의 파괴할 수 없는 고무 로봇을 기반으로 한 자율 미니 로봇을 구축했다. 이러한 소프트 봇은 모터가 아니라 유압, 공압 또는 압전 시스템에 의해 구동된다. 실제 근육 세포를 가진 하이브리드 폴리머 구조도 있다.
그러나 이러한 구동 기술에는 몇 가지 단점이 있다.
공압 장치는 많은 공간을 차지하고 피에조 요소는 제한된 동작 범위 만 가지며 유압 장치는 종종 다소 느리다.
거미 관절을 독특하게 만드는 이유
이제 자연이 수백만 년 동안 성공적으로 사용해온 기술인 거미의 다리 구조로 솔루션을 제공 할 수 있다. 콜로라도 대학의 니콜라스 켈라리스(Nicholas Kellaris)와 그의 동료들은 “운동을 위해 길항근 쌍을 사용하는 대부분의 동물과 달리 거미는 다리를 펴기 위해 유압 메커니즘을 사용하고 탄력있는 인대 또는 근육이 굴곡을 수행한다.
한편으로, 이 조합은 거미에게 연약하고 복잡한 웹을 짜고 균형을 잡을 수 있는 정밀도와 감도를 제공한다. 반면에 이 관절은 먹이를 찾는 데 필요한 힘과 속도를 제공한다.
Kellaris와 그의 팀은 이제 거미 유형에 따라 관절이 있는 다양한 소프트봇(Softbot) 변형의 도움으로 이 기술이 소프트 로봇에 이점을 가져올 수 있는지 테스트했다.
부드러운 파우치, 탄성 조인트
Softbots의 조인트 시스템은 탄성 폴리머 조각으로 서로 연결된 두 개의 평평하고 단단한 플라스틱 부품으로 구성된다. 이 조인트 아래에는 비전도성 오일로 채워져 있고 전극이 외부와 내부에 놓여있는 유연한 백이 있다. 현재 전극에 전류가 가해지면 전극을 서로 끌어당기고 백의 변형을 일으키는 전기장이 생성된다. 이것은 관절을 구부리는 인장력을 생성한다.
전기가 다시 꺼지면 관절이 이완되고 다시 늘어난다.
원칙적으로 스파이더와 반대로 작동하지만 유압 및 탄성 요소의 조합은 동일하다. 슈투트가르트에있는 Max Planck Institute for Intelligent Systems의 공동 저자 크리스토프 케플링어(Christoph Keplinger)는 "로봇을 무겁게 하는 주변 부품이 없기 때문에 SES 조인트는 매우 간단하고 가볍다"고 설명했다.
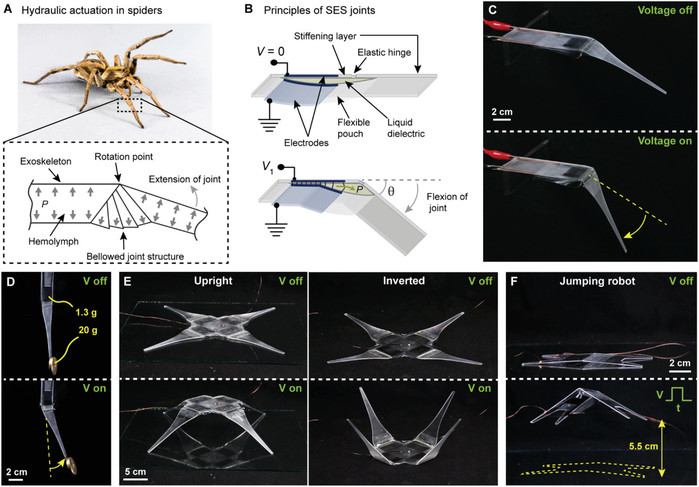 |
| ▲ Fig 1. 거미에서 영감을 얻은 전자 유압식 소프트 작동 (SES) 조인트의 원리. A) 거미의 경골-중족골 관절의 유압 작동. 혈액 림프액의 압력은 다리를 확장시킨다. 저작권 2014, IEEE. 늑대 거미 (Lycosidae과)가 그려져 있다. B) SES 조인트는 액체 유전체로 채워진 유연한 파우치와 외부에 한 쌍의 대향 전극으로 구성. 강화 레이어는 한쪽에 배치되어 작동을 제한하는 반면 유연한 힌지는 안정성과 수동 복원력을 제공한다. 전압을 가할 때 Maxwell 응력은 전극이 점진적으로 함께 압축 되도록해 액체 유전체 (P)를 가압하고 관절이 θ 각도로 구부러지게 한다. C) 전압이 꺼지고 전압이 켜진 상태 (8kV 적용) SES 조인트로 인해 조인트가 구부러진다. D) 단단한 보강층은 사지를 따라 효율적인 힘 전달을 지원한다. 여기에서 1.3g 액추에이터는 회전 지점에서 거의 10cm 떨어진 곳에서 20g을 들어 올린다. E) 여러 SES 조인트를 결합하여 다양한 유형의 로봇 구조를 만들 수 있다. F) SES 조인트는 뛰어난 중량 대 중량비를 특징으로하며 점프 로봇을 만드는 데 사용할 수 있다. (출처: 관련논문 Fig 1 Spider-Inspired Electrohydraulic Actuators for Fast, Soft-Actuated Joints) |
빠른 속도와 부드러움
첫 번째 테스트에서 알 수 있듯이 전기 유압식 Softbot 조인트는 70도까지 구부릴 수 있으며 이를 위해 12~30 밀리 초 만 필요하다. 그들은 또한 거미를 모델로 한 작은 거미 로봇이 자신의 높이의 14배를 공중으로 뛰어올 수 있도록 충분한 힘을 개발했다. 무게 관련 출력은 킬로그램 당 230와트이며 이는 인간 근육의 출력에 가깝다.
동시에, 이러한 관절 시스템은 그립핑 핸드의 프로토 타입이 보여주는 것처럼 정확하고 도약 된 움직임을 수행하는 데에도 사용할 수 있다. 그것은 각각 두 개의 관절이 있는 세 개의 손가락으로 구성된다. 테스트에서 이 쥐는 손으로 딸기, 사과, 커피 잔 등 다양한 물건을 미끄러지거나 으깨지 않고 들어 올렸다. "단단한 구조와 부드러운 구조의 조합은 효과적인 동력 전달을 가능하게 하지만 여전히 구조에 충분한 유연성을 제공한다"고 팀은 말했다.
<이것이 거미 원리에 따라 관절이 작동하는 방식이다. © MPI 지능형 시스템 연구소>
다재다능하고 저렴
과학자들에 따르면, 이러한 거미형 관절 시스템은 작고 가볍지만 여전히 다재다능한 로봇이 필요한 곳에서 특히 유용 할 수 있다. 예를 들어, 통과할 수 없거나 좁은 공간을 탐색하는 자율 소프트 봇을 구동할 수 있을 뿐만 아니라 새로운 유형의 그리퍼도 가능하게 할 수 있다. 조인트 시스템과 정전식 액추에이터를 결합하면 에너지의 50%를 회수하고 로봇을 더욱 에너지 효율적으로 만들 수 있다.
"이 거미에서 영감을 받은 관절은 매우 강력하고 에너지를 거의 사용하지 않으며 제조가 쉽고 저렴하다. 우리는 식품 포장에도 사용되는 플라스틱을 사용한다. 관절의 생산은 쉽게 확장될 수 있다”고 Keplinger는 설명했다.
(Advanced Science, 2021; doi : 10.1002 / advs.202100916)
출처 : Max Planck Institute for Intelligent Systems
[더사이언스플러스=문광주 기자]
[저작권자ⓒ the SCIENCE plus. 무단전재-재배포 금지]







주요기사
+


많이 본 기사




Basic Science
+
AI & Tech
+
Photos
+






- the SCIENCE plus (04426) 서울시 용산구 이촌로 88길 30 대표전화 : 010-7145-3730 청소년보호관리책임자 : 문광주
- 발행인· 편집인 : 문광주 등록번호 : 경기 아52382 등록/발행일 : 2019-11-07 제보메일 : helloscienceplus@gmail.com
- 본 콘텐츠의 저작권은 the SCIENCE plus 또는 제공처에 있으며 이를 무단 이용하는 경우 저작권법 등에 따라 법적책임을 질 수 있습니다.
- Copyright ⓒ the SCIENCE plus All rights reserved. 0.0503