
















3분 읽기 + 50초
- 자율 잠수 로봇이 해저의 쓰레기를 독립적으로 감지하고 집게팔을 사용하여 수거
- 무인 서비스 보트가 초음파를 사용해 해저의 쓰레기를 대략적으로 수색
- 보트가 쓰레기를 발견하면, 약 50cm 길이의 수색 로봇을 파견
- 자율 수중 쓰레기 수거를 이용한 해양 정화는 수심 16m 이상에서 수익성이 있다.
비닐봉지, 어망, 페트병 등 바다는 플라스틱 쓰레기로 가득 차 있다. 극지방의 가장 깊은 곳과 얼음 아래에도 플라스틱 쓰레기가 쌓인다. 이러한 플라스틱 쓰레기는 물고기와 새의 뱃속에 축적되고, 미세 플라스틱으로 분쇄되어 수십 년 동안 환경에 잔류한다. 연안 해역과 항구에는 전동 스쿠터, 자전거, 폐타이어 등 불법 투기된 쓰레기가 더해진다. 하지만 이 엄청난 양의 해양 쓰레기를 수거하는 것은 거의 불가능해 보인다. 하지만 과연 그럴까?
다중 구성 요소 쓰레기 수거
한 가지 해결책은 로봇 쓰레기 수거, 즉 해저에서 폐기물을 수거하는 자율 작동 잠수정이다. 몇 년 전, 뮌헨 공과대학교 연구팀은 EU 프로젝트 SEACLEAR의 일환으로 이러한 로봇 시스템을 개발하여 발표했다. 자율 해양 쓰레기 수거 시스템은 AI로 제어되고 자율적으로 작동하는 여러 구성 요소로 구성된다. 먼저, 무인 서비스 보트가 초음파를 사용해 해저의 쓰레기를 대략적으로 수색한다.
보트가 쓰레기를 발견하면, 약 50cm 길이의 수색 로봇을 파견한다. 이 로봇은 해저를 빠르고 효율적으로 스캔하는 데 특화되어 있다. 그런 다음 실제 쓰레기 수거가 시작된다. 보트와 로봇이 수집한 정보를 기반으로 8개의 소형 터빈으로 구동되는 쓰레기 수거 잠수정이 수중 쓰레기가 있는 곳으로 잠수한다. 케이블로 보트와 연결된 이 잠수정에는 카메라, 소나, 그리고 쓰레기를 잡을 수 있는 집게가 장착되어 있다.
식별 및 신중한 파악
하지만 해저의 파편을 식별하는 것은 인공지능에게도 쉬운 일이 아니다. 신경망 학습 자료로 활용할 수 있는 수중 물체 이미지 자료는 거의 없다. 뮌헨 공과대학교의 슈테판 소스노프스키(Stefan Sosnowski) 는 "이러한 이유로 프로젝트 파트너들은 지금까지 7천 개가 넘는 이미지에 라벨을 붙였다. 즉, 해저에 속하지 않는 물체로 표시한 것이다"고 말했다. 파편이 식별되면 AI 시스템은 이미지를 3D 이미지로 변환한다. "이는 물체를 안전하게 잡을 수 있는 위치를 결정하는 데 중요하다.”
다이빙 로봇의 자율 그립퍼가 무언가를 잡을 때, 플라스틱 양동이가 깨지거나 병이 깨질까 봐 걱정할 필요가 없다. 네 개의 손가락을 가진 이 거대한 손은 4천N(뉴턴)의 힘으로 쥐고 최대 250kg의 물체를 잡을 수 있을 뿐만 아니라, 특수 센서를 사용하여 손상을 방지하기 위해 얼마나 많은 힘을 사용할 수 있는지 판단한다. 잠수함은 추진 터빈이 정지했을 때에도 부유 상태를 유지하는 부력 폼으로 둘러싸여 있다. 이를 통해 로봇이 물체를 정확하게 잡기가 더 쉬워진다.
마르세유 항구에서의 테스트
SEACLEAR 팀은 마르세유 항구에서 쓰레기 수거 시스템을 테스트했다. 잠수 로봇은 항구 바닥에서 폐차된 자동차 타이어, 카시트, 전동 스쿠터와 같은 물품을 수거했다. 수거한 쓰레기는 부유 쓰레기 처리장 역할을 하는 소형 보트로 운반된다.
뮌헨 공과대학교 연구팀은 이미 쓰레기 수거 시스템의 비용-편익 분석을 완료했다. 분석에 따르면, 자율 수중 쓰레기 수거를 이용한 해양 정화는 수심 16m 이상에서 수익성이 있는 것으로 나타났다.
출처: 뮌헨 공과대학교
- 자율 잠수 로봇이 해저의 쓰레기를 독립적으로 감지하고 집게팔을 사용하여 수거
- 무인 서비스 보트가 초음파를 사용해 해저의 쓰레기를 대략적으로 수색
- 보트가 쓰레기를 발견하면, 약 50cm 길이의 수색 로봇을 파견
- 자율 수중 쓰레기 수거를 이용한 해양 정화는 수심 16m 이상에서 수익성이 있다.
자율 잠수 로봇, 해양 쓰레기 수거
AI 제어 수중 쓰레기 수거 첫 시험 성공
자율 쓰레기 수거:
해양 오염 방지를 위한 새로운 기술이 지중해에서 첫 시험을 마쳤다. 자율 잠수 로봇이 해저의 쓰레기를 독립적으로 감지하고 집게팔을 사용하여 수거한다. 무인 선박이 떠다니는 쓰레기 하치장 역할을 한다. 마르세유 항구에서는 이 AI 제어 시스템이 해저에서 폐차 타이어, 전동 스쿠터 등의 쓰레기를 성공적으로 수거했다.
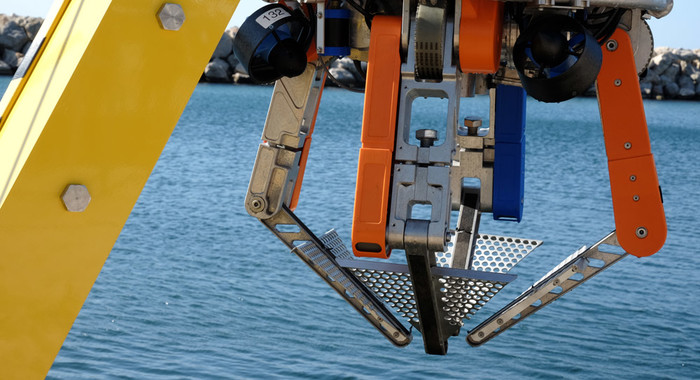 |
| ▲ SEACLEAR 프로젝트에서는 여러 로봇 유닛이 협력하여 폐기물을 수거한다. © SEACLEAR |
비닐봉지, 어망, 페트병 등 바다는 플라스틱 쓰레기로 가득 차 있다. 극지방의 가장 깊은 곳과 얼음 아래에도 플라스틱 쓰레기가 쌓인다. 이러한 플라스틱 쓰레기는 물고기와 새의 뱃속에 축적되고, 미세 플라스틱으로 분쇄되어 수십 년 동안 환경에 잔류한다. 연안 해역과 항구에는 전동 스쿠터, 자전거, 폐타이어 등 불법 투기된 쓰레기가 더해진다. 하지만 이 엄청난 양의 해양 쓰레기를 수거하는 것은 거의 불가능해 보인다. 하지만 과연 그럴까?
다중 구성 요소 쓰레기 수거
한 가지 해결책은 로봇 쓰레기 수거, 즉 해저에서 폐기물을 수거하는 자율 작동 잠수정이다. 몇 년 전, 뮌헨 공과대학교 연구팀은 EU 프로젝트 SEACLEAR의 일환으로 이러한 로봇 시스템을 개발하여 발표했다. 자율 해양 쓰레기 수거 시스템은 AI로 제어되고 자율적으로 작동하는 여러 구성 요소로 구성된다. 먼저, 무인 서비스 보트가 초음파를 사용해 해저의 쓰레기를 대략적으로 수색한다.
보트가 쓰레기를 발견하면, 약 50cm 길이의 수색 로봇을 파견한다. 이 로봇은 해저를 빠르고 효율적으로 스캔하는 데 특화되어 있다. 그런 다음 실제 쓰레기 수거가 시작된다. 보트와 로봇이 수집한 정보를 기반으로 8개의 소형 터빈으로 구동되는 쓰레기 수거 잠수정이 수중 쓰레기가 있는 곳으로 잠수한다. 케이블로 보트와 연결된 이 잠수정에는 카메라, 소나, 그리고 쓰레기를 잡을 수 있는 집게가 장착되어 있다.
 |
| ▲ SEACLEAR 프로젝트에서는 여러 로봇 유닛이 협력하여 폐기물을 수거gks다. © SEACLEAR |
식별 및 신중한 파악
하지만 해저의 파편을 식별하는 것은 인공지능에게도 쉬운 일이 아니다. 신경망 학습 자료로 활용할 수 있는 수중 물체 이미지 자료는 거의 없다. 뮌헨 공과대학교의 슈테판 소스노프스키(Stefan Sosnowski) 는 "이러한 이유로 프로젝트 파트너들은 지금까지 7천 개가 넘는 이미지에 라벨을 붙였다. 즉, 해저에 속하지 않는 물체로 표시한 것이다"고 말했다. 파편이 식별되면 AI 시스템은 이미지를 3D 이미지로 변환한다. "이는 물체를 안전하게 잡을 수 있는 위치를 결정하는 데 중요하다.”
 |
다이빙 로봇의 자율 그립퍼가 무언가를 잡을 때, 플라스틱 양동이가 깨지거나 병이 깨질까 봐 걱정할 필요가 없다. 네 개의 손가락을 가진 이 거대한 손은 4천N(뉴턴)의 힘으로 쥐고 최대 250kg의 물체를 잡을 수 있을 뿐만 아니라, 특수 센서를 사용하여 손상을 방지하기 위해 얼마나 많은 힘을 사용할 수 있는지 판단한다. 잠수함은 추진 터빈이 정지했을 때에도 부유 상태를 유지하는 부력 폼으로 둘러싸여 있다. 이를 통해 로봇이 물체를 정확하게 잡기가 더 쉬워진다.
마르세유 항구에서의 테스트
SEACLEAR 팀은 마르세유 항구에서 쓰레기 수거 시스템을 테스트했다. 잠수 로봇은 항구 바닥에서 폐차된 자동차 타이어, 카시트, 전동 스쿠터와 같은 물품을 수거했다. 수거한 쓰레기는 부유 쓰레기 처리장 역할을 하는 소형 보트로 운반된다.
뮌헨 공과대학교 연구팀은 이미 쓰레기 수거 시스템의 비용-편익 분석을 완료했다. 분석에 따르면, 자율 수중 쓰레기 수거를 이용한 해양 정화는 수심 16m 이상에서 수익성이 있는 것으로 나타났다.
출처: 뮌헨 공과대학교
[더사이언스플러스=문광주 기자]
[저작권자ⓒ the SCIENCE plus. 무단전재-재배포 금지]







주요기사
+



많이 본 기사




Basic Science
+

AI & Tech
+
Photos
+






- the SCIENCE plus (04426) 서울시 용산구 이촌로 88길 30 대표전화 : 010-7145-3730 청소년보호관리책임자 : 문광주
- 발행인· 편집인 : 문광주 등록번호 : 경기 아52382 등록/발행일 : 2019-11-07 제보메일 : helloscienceplus@gmail.com
- 본 콘텐츠의 저작권은 the SCIENCE plus 또는 제공처에 있으며 이를 무단 이용하는 경우 저작권법 등에 따라 법적책임을 질 수 있습니다.
- Copyright ⓒ the SCIENCE plus All rights reserved. 0.0453