
















- 학습 가능한 로봇 시스템은 플라스틱 폐기물을 독립적으로 감지, 매핑 및 수집
- 프로토타입 첫 번째 테스트, 2021년 10월 크로아티아 두브로브니크 앞바다에서 성공
- 2022년 5월에는 함부르크 항구에서 추가 시험 운행
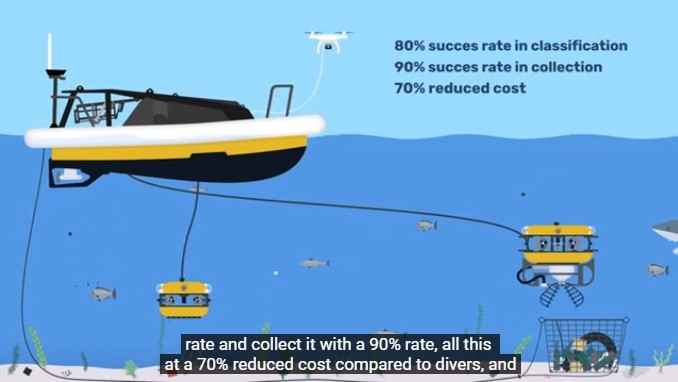
- 목표, 예측 비율 80%로 수중 폐기물을 분류하고 90%를 성공적으로 수집
해저의 플라스틱 폐기물에 대한 로봇
학습 가능한 로봇 시스템은 플라스틱 폐기물을 독립적으로 감지, 매핑 및 수집해야 합니다.
자율 쓰레기 수집기:
연구원들은 미래에 해저에 있는 플라스틱 폐기물을 자율적으로 찾고, 매핑하고, 수집할 수 있는 로봇 시스템을 개발하고 있다. 관찰 잠수 로봇, 드론, 수집 로봇이 있는 로봇 수색선으로 구성되어 있다. 적응형 인공 지능 덕분에 로봇은 바다 안팎의 변화하는 조건에 유연하게 적응할 수 있어야 한다. 프로토타입의 첫 번째 테스트가 이미 진행됐다.
 |
▲ 미래에는 4개의 자율 로봇 구성 요소로 구성된 시스템이 해저의 플라스틱 폐기물을 감지하고 수집할 것이다. © SeaClear |
바다는 플라스틱 쓰레기로 가득 차 있다.
가장 깊은 바다와 극지방의 얼음 아래에서도 미세 플라스틱과 더 큰 플라스틱 부품이 해저에 모인다. 이 플라스틱 페기물은 관찰 결과에서 알 수 있듯이 20년이 지난 후에도 거의 자체적으로 분해되지 않는다. 지금까지는 해저를 청소하는 데 시간이 많이 걸리고 비용도 많이 들었다. 폐기물 처리 조치는 주로 위험하지 않은 해안과 수면에 집중됐다.
선박, 잠수 로봇, 드론으로 구성된 시스템
이것은 미래에 해저에서 플라스틱 쓰레기를 독립적으로 찾아 수거하는 자율 로봇인 로봇 쓰레기 수거기에 의해 해결될 수 있다. 뮌헨 공과 대학의 과학자들은 현재 8개의 유럽 파트너 기관과 함께 이러한 시스템을 개발하고 있다. "SeaClear 프로젝트는 해양 플라스틱 폐기물을 검색, 식별 및 수집하는 프로세스를 자동화하는 것을 목표로 한다"고 팀이 말했다.
 |
 |
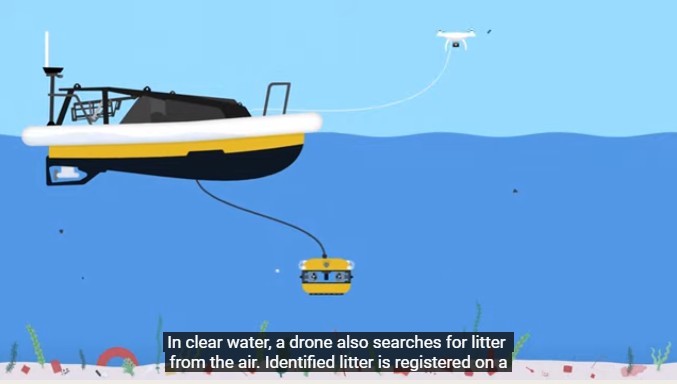
자율 주행 로봇 뗏목은 해저의 초기 음파탐지 스캔을 수행하고 많은 양의 쓰레기를 찾아낸다.
또한 작전을 위한 모선이자 통제 센터 역할을 한다. 카메라, 수중 음파 탐지기 및 금속 탐지기가 장착된 잠수 로봇은 배에서 출발해 깊은 곳의 쓰레기를 추적하고 해저를 클로즈업한다. 공중에서 날아오는 드론은 더 많은 쓰레기는 물론 물 속의 장애물도 감지할 수 있도록 한다.
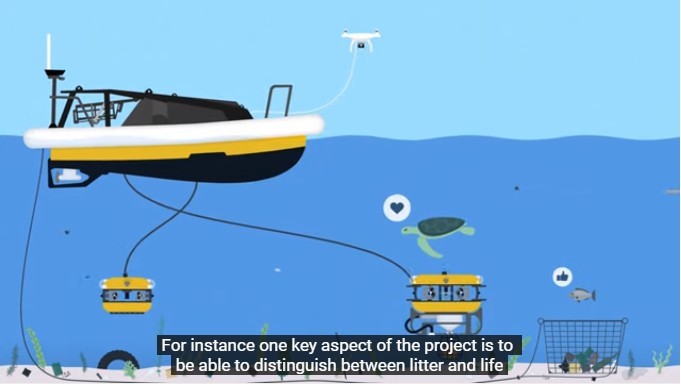
이 "쓰레기 스카우트"의 모든 정보는 가상 지도로 결합된다. 그런 다음 매핑된 폐기물을 스캔하고 그리퍼를 사용하여 폐기물을 수거 바구니에 넣는 자율 수집 로봇의 방향을 지정하는 데 사용된다. 컨테이너가 가득 차면 배에 올려져 비워진다.
 |
 |
 |
인공 지능은 유연성을 보장한다.
이론상으로 간단해 보이지만 실제로는 그렇지 않다.
"수중 사용을 위한 자율 로봇을 개발하는 것은 매우 특별한 도전이다"고 뮌헨 공과 대학의 슈테판 소스노브스키(Stefan Sosnowski)가 설명했다. 육지와 달리 물에는 매우 특별한 조건이 있기 때문이다. “쓰레기 조각이 식별되고 위치가 지정되면 로봇은 먼저 쓰레기 주변으로 움직여야 한다. 그렇게 하는 동안 그는 때때로 자신을 나아가야 할 움직임이 강한 흐름에 맞닥뜨릴 수 있다. 이를 바로 잡는 것이 SeaClear 프로젝트에서 우리의 임무다.”
이를 위해 팀은 기계 학습 방법을 사용한다. 인공 지능은 로봇이 언제, 어떤 조건에서 움직여야 하는지, 쓰레기를 줍기 위해 어떻게 움직여야 하는지 학습한다. 대학의 SeaClear 프로젝트 코디네이터 산드라 히르쉐(Sandra Hirche)는 "또 다른 문제는 육상에서 사용하는 컴퓨팅 성능이 없다는 것이다. “고성능 컴퓨터가 있는 대규모 데이터 센터에 연결할 수 없다. 따라서 우리가 개발하는 알고리즘은 가능한 한 효율적이고 자원을 절약해야 한다.”
<이것이 로봇 쓰레기 수거가 해저에서 작동하는 방식이다. © SeaClear Project>
첫 번째 테스트 성공
지금까지는 이러한 어려움에도 불구하고 개발이 성공적이었다.
프로토타입을 사용한 첫 번째 테스트는 2021년 10월 크로아티아 도시 두브로브니크 앞바다에서 수행됐다. "우리는 관찰 잠수 로봇과 드론을 테스트했고 테스트 지역에 실제 수중 쓰레기를 배치했다"고 팀이 보고했다. 로봇은 비디오와 음파 탐지기를 사용하여 이 쓰레기를 추적하고 매핑해야 했다.
2022년 5월에는 함부르크 항구에서 추가 시험 운행이 있을 것이다.
SeaClear 시스템이 완전히 작동하면 예측 비율 80%로 수중 폐기물을 분류하고 90%를 성공적으로 수집해야 한다. 로봇은 인간 잠수부만큼 효과적일 것이다.
출처: Technische Universität München / 뮌헨 공과 대학
[더사이언스플러스=문광주 기자]
[저작권자ⓒ the SCIENCE plus. 무단전재-재배포 금지]







주요기사
+


많이 본 기사




Basic Science
+
AI & Tech
+
Photos
+






- the SCIENCE plus (04426) 서울시 용산구 이촌로 88길 30 대표전화 : 010-7145-3730 청소년보호관리책임자 : 문광주
- 발행인· 편집인 : 문광주 등록번호 : 경기 아52382 등록/발행일 : 2019-11-07 제보메일 : helloscienceplus@gmail.com
- 본 콘텐츠의 저작권은 the SCIENCE plus 또는 제공처에 있으며 이를 무단 이용하는 경우 저작권법 등에 따라 법적책임을 질 수 있습니다.
- Copyright ⓒ the SCIENCE plus All rights reserved. 0.0499